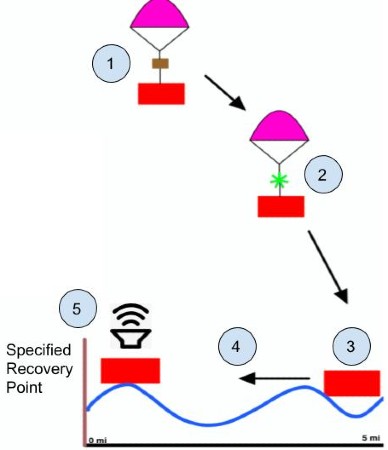
The mission begins with the controlled descent of the Autonomous Ocean Recovery System using a parachute. Once the recovery system reaches a specified point above the water, the parachute will detach from the recovery vehicle. The recovery vehicle will then land in the water.
After a water landing has been made, the recovery vehicle will begin to autonomously return to the specified recovery point and data transmission from the payload will transmit at specified intervals.
Once the recovery vehicle arrives at the specified recovery point, the data transmission will switch from interval to continuous transmission and the audio beacon will sound.