Recovery Vehicle

Hull
- V-hull design, selected for higher resistance to wave conditions
- Composed of polystyrene foam encased in fiberglass
Power
- LiPo 3S battery 2200mAh (Autonomy and Recovery power)
- 9V battery (Data Collection power)
Onboard Autonomy and Recovery Hardware
- Autonomy “Brain” and Tracking Hardware
- Pixhawk PX4 2.4.8 with 915 MHz HolyBro transceiver
- ReadyToSky GPS
- Propulsion and Steering
- Turnigy D2836/8 1100KV propulsion motor
- Dynamite DYNM3865 60A Brushless Marine ESC 2-3S
- Fielect drive shaft
- 3D PLA printed propellor
- Waterproof DS3218MG steering servo
- 3D PLA printed rudder
- Auxiliary Components
- Iris Ultra 48″ parachute
- SwellPro Waterproof Drone Bait Release for parachute release mechanism
- Amplified speaker kit
Onboard Data Collection (Payload) Hardware
- Raspberry Pi 4
- ERTD2A101B temperature sensor
- Aerocomm
- Yagi Antenna
- Davola Wide-Angle Action Camera
- SPOT Trace GPS (redundant GPS)
Interesting note: the UHABS-7 team originally chose the Arduino for the onboard “brain” for the recovery vehicle since team members have had past experience with using an Arduino. After talking with Eric Pilger from HSFL, he advised the UHABS-7 team that a Raspberry Pi would be a better alternative to the Arduino. A PCC and DMM were also created to compare different microcontrollers and microprocessors and the Raspberry Pi was selected as the best option.
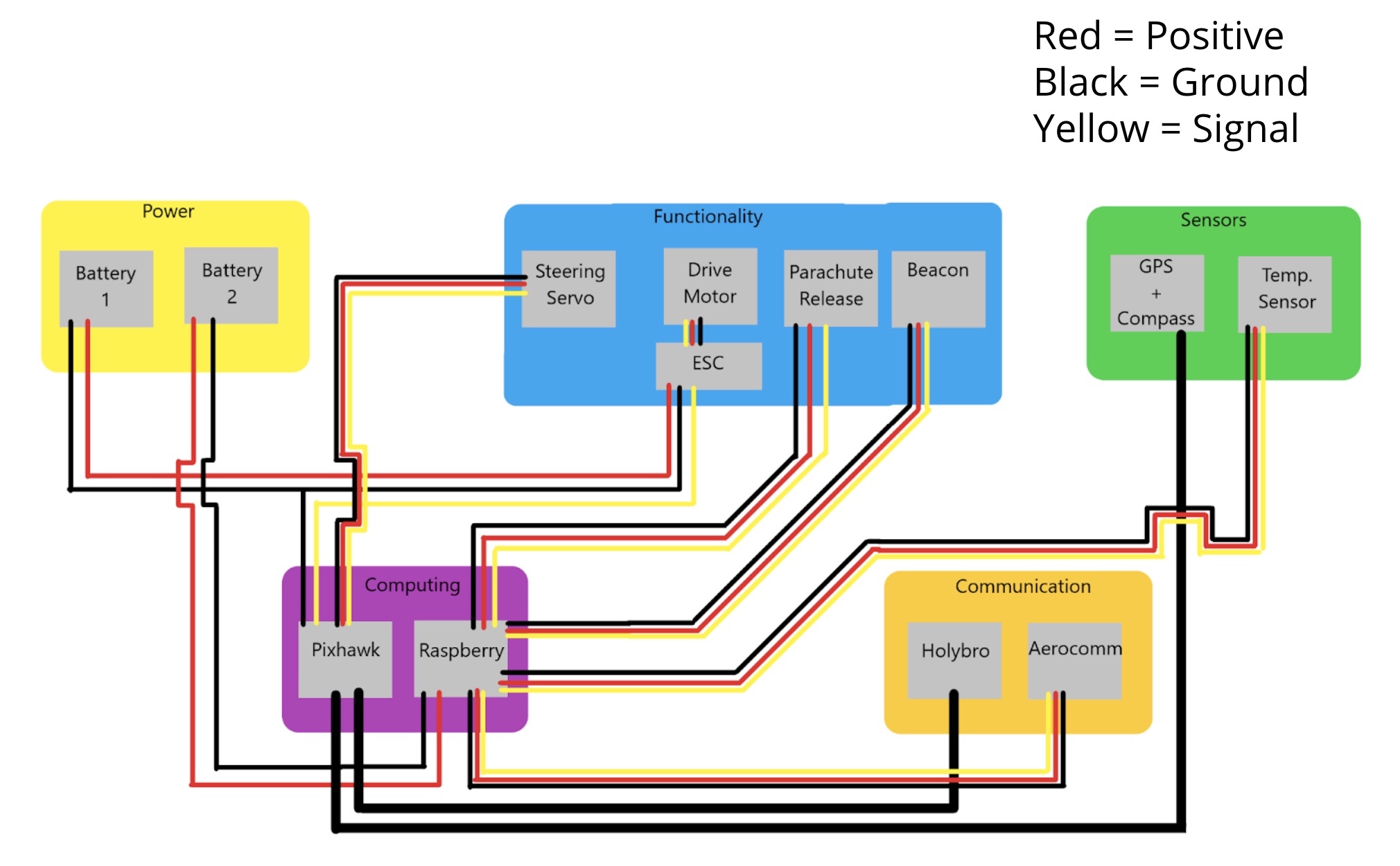
Onboard Electrical Wiring
Ground Control Station

GCS Software
- Ardupilot Mission Planner (Autonomy)
- COSMOS (Data Collection)
GCS Hardware
- 2 Laptops (Mission Planner and COSMOS will be run on separate laptops)
- Shore power through wall outlet or generator
- 915MHz HolyBro transceiver
- AeroComm
- Yagi Antenna